
YOLOv5 🚀 is a family of object detection architectures and models pretrained on the COCO dataset, and represents Ultralytics open-source research into future vision AI methods, incorporating lessons learned and best practices evolved over thousands of hours of research and development.
1. 环境搭建
自动广告跳过这个想法,不过由于各种原因一直没有实时。知道最近才又重新开始折腾这个东西,yolov5的安装这里就不再说明了,建议使用anaconda安装。我创建了一个conda环境可以直接下载之后通过conda安装:
# 1. conda 环境地址:https://anaconda.org/obaby/yolov5 # 2. 下载对应操作系统的环境yml脚本 # 3. 在Terminal 或者 an Anaconda Prompt内执行 conda env create user/my-environment source activate my-environment

如果不想使用上面的安装方法可以参考:https://blog.csdn.net/oJiWuXuan/article/details/107558286 和https://github.com/ultralytics/yolov5 按照官方指导进行安装。
2.数据准备
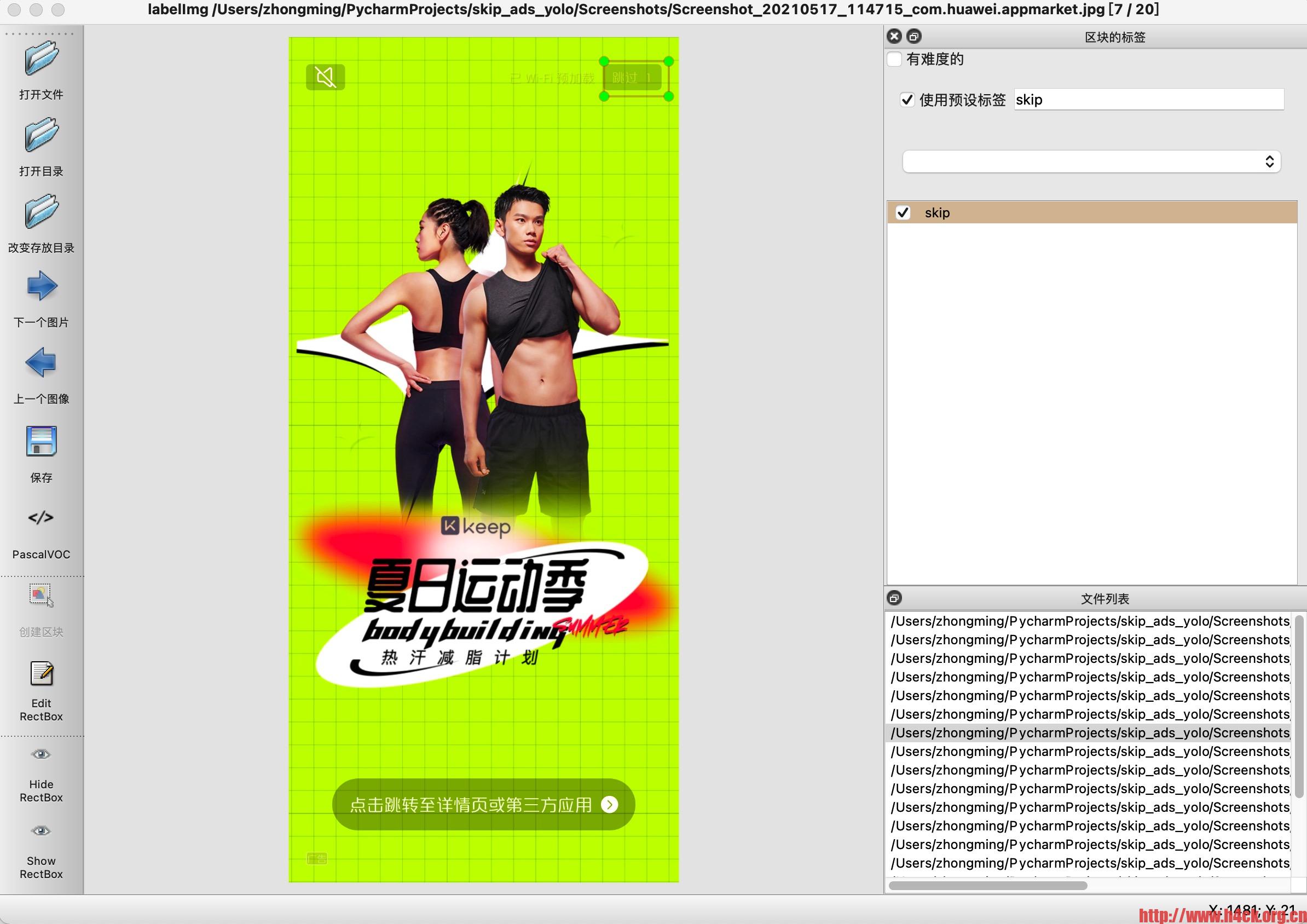
将手机上已经准备好的截图复制到Screenshot目录下,使用[labelImg](https://github.com/tzutalin/labelImg){conda 环境地址:https://anaconda.org/obaby/labelimg 可以直接导入使用},对图片进行标记。将标记后的xml文件保存到xmls目录下。
屏幕截图:
labelimg标记:
xml文件路径:

3.构建数据集:
在根目录下创建make_text.py代码如下(以下代码基本都是拷贝自:https://blog.csdn.net/oJiWuXuan/article/details/107558286 这篇文章,表示感谢!!):
import os
import random
# https://blog.csdn.net/oJiWuXuan/article/details/107558286
trainval_percent = 0.9
train_percent = 0.9
xmlfilepath = 'xmls'
txtsavepath = 'Screenshots'
total_xml = os.listdir(xmlfilepath)
num = len(total_xml)
list = range(num)
tv = int(num * trainval_percent)
tr = int(tv * train_percent)
trainval = random.sample(list, tv)
train = random.sample(trainval, tr)
ftrainval = open('data/ImageSets/trainval.txt', 'w')
ftest = open('data/ImageSets/test.txt', 'w')
ftrain = open('data/ImageSets/train.txt', 'w')
fval = open('data/ImageSets/val.txt', 'w')
for i in list:
name = total_xml[i][:-4] + '\n'
if i in trainval:
ftrainval.write(name)
if i in train:
ftrain.write(name)
else:
fval.write(name)
else:
ftest.write(name)
ftrainval.close()
ftrain.close()
fval.close()
ftest.close()
创建voc_label.py代码如下,需要注意classes中的列别信息:
# xml解析包
import xml.etree.ElementTree as ET
import pickle
import os
# os.listdir() 方法用于返回指定的文件夹包含的文件或文件夹的名字的列表
from os import listdir, getcwd
from os.path import join
sets = ['train', 'test', 'val']
classes = ['skip']
# 进行归一化操作
def convert(size, box): # size:(原图w,原图h) , box:(xmin,xmax,ymin,ymax)
dw = 1./size[0] # 1/w
dh = 1./size[1] # 1/h
x = (box[0] + box[1])/2.0 # 物体在图中的中心点x坐标
y = (box[2] + box[3])/2.0 # 物体在图中的中心点y坐标
w = box[1] - box[0] # 物体实际像素宽度
h = box[3] - box[2] # 物体实际像素高度
x = x*dw # 物体中心点x的坐标比(相当于 x/原图w)
w = w*dw # 物体宽度的宽度比(相当于 w/原图w)
y = y*dh # 物体中心点y的坐标比(相当于 y/原图h)
h = h*dh # 物体宽度的宽度比(相当于 h/原图h)
return (x, y, w, h) # 返回 相对于原图的物体中心点的x坐标比,y坐标比,宽度比,高度比,取值范围[0-1]
# year ='2012', 对应图片的id(文件名)
def convert_annotation(image_id):
'''
将对应文件名的xml文件转化为label文件,xml文件包含了对应的bunding框以及图片长款大小等信息,
通过对其解析,然后进行归一化最终读到label文件中去,也就是说
一张图片文件对应一个xml文件,然后通过解析和归一化,能够将对应的信息保存到唯一一个label文件中去
labal文件中的格式:calss x y w h 同时,一张图片对应的类别有多个,所以对应的bunding的信息也有多个
'''
# 对应的通过year 找到相应的文件夹,并且打开相应image_id的xml文件,其对应bund文件
in_file = open('train/%s.xml' % (image_id), encoding='utf-8')
# 准备在对应的image_id 中写入对应的label,分别为
# <object-class> <x> <y> <width> <height>
out_file = open('data/labels/%s.txt' % (image_id), 'w', encoding='utf-8')
# 解析xml文件
tree = ET.parse(in_file)
# 获得对应的键值对
root = tree.getroot()
# 获得图片的尺寸大小
size = root.find('size')
# 如果xml内的标记为空,增加判断条件
if size != None:
# 获得宽
w = int(size.find('width').text)
# 获得高
h = int(size.find('height').text)
# 遍历目标obj
for obj in root.iter('object'):
# 获得difficult ??
difficult = obj.find('difficult').text
# 获得类别 =string 类型
cls = obj.find('name').text
# 如果类别不是对应在我们预定好的class文件中,或difficult==1则跳过
if cls not in classes or int(difficult) == 1:
continue
# 通过类别名称找到id
cls_id = classes.index(cls)
# 找到bndbox 对象
xmlbox = obj.find('bndbox')
# 获取对应的bndbox的数组 = ['xmin','xmax','ymin','ymax']
b = (float(xmlbox.find('xmin').text), float(xmlbox.find('xmax').text), float(xmlbox.find('ymin').text),
float(xmlbox.find('ymax').text))
print(image_id, cls, b)
# 带入进行归一化操作
# w = 宽, h = 高, b= bndbox的数组 = ['xmin','xmax','ymin','ymax']
bb = convert((w, h), b)
# bb 对应的是归一化后的(x,y,w,h)
# 生成 calss x y w h 在label文件中
out_file.write(str(cls_id) + " " + " ".join([str(a) for a in bb]) + '\n')
# 返回当前工作目录
wd = getcwd()
print(wd)
for image_set in sets:
'''
对所有的文件数据集进行遍历
做了两个工作:
1.将所有图片文件都遍历一遍,并且将其所有的全路径都写在对应的txt文件中去,方便定位
2.同时对所有的图片文件进行解析和转化,将其对应的bundingbox 以及类别的信息全部解析写到label 文件中去
最后再通过直接读取文件,就能找到对应的label 信息
'''
# 先找labels文件夹如果不存在则创建
if not os.path.exists('data/labels/'):
os.makedirs('data/labels/')
# 读取在ImageSets/Main 中的train、test..等文件的内容
# 包含对应的文件名称
image_ids = open('data/ImageSets/%s.txt' % (image_set)).read().strip().split()
# 打开对应的2012_train.txt 文件对其进行写入准备
list_file = open('data/%s.txt' % (image_set), 'w')
# 将对应的文件_id以及全路径写进去并换行
for image_id in image_ids:
list_file.write('data/images/%s.jpg\n' % (image_id))
# 调用 year = 年份 image_id = 对应的文件名_id
convert_annotation(image_id)
# 关闭文件
list_file.close()
# os.system(‘comand’) 会执行括号中的命令,如果命令成功执行,这条语句返回0,否则返回1
# os.system("cat 2007_train.txt 2007_val.txt 2012_train.txt 2012_val.txt > train.txt")
# os.system("cat 2007_train.txt 2007_val.txt 2007_test.txt 2012_train.txt 2012_val.txt > train.all.txt")
分别运行makeTxt.py和voc_label.py。
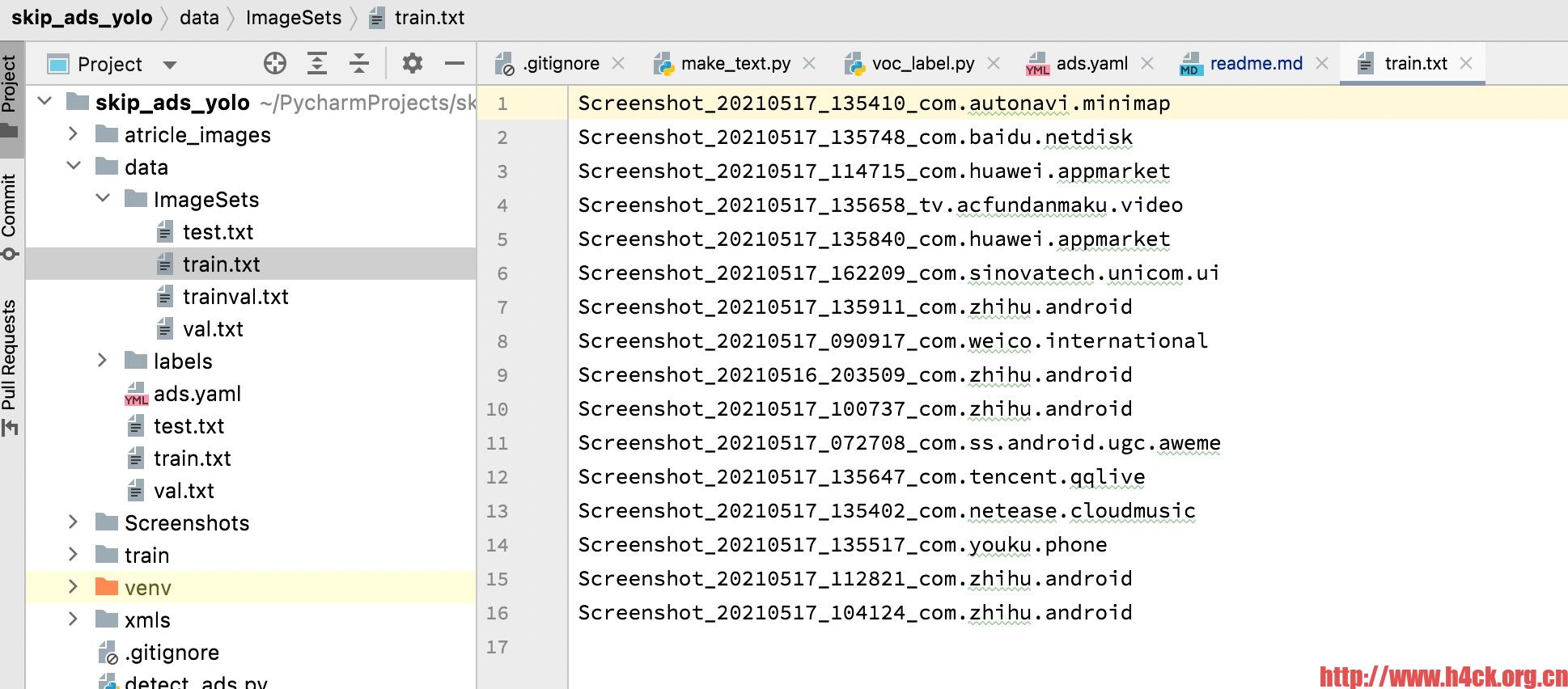
make_text.py主要是将数据集分类成训练数据集和测试数据集,默认train,val,test按照8:1:1的比例进行随机分类,运行后ImagesSets文件夹中会出现四个文件,主要是生成的训练数据集和测试数据集的图片名称,如下图。同时data目录下也会出现这四个文件,内容是训练数据集和测试数据集的图片路径。
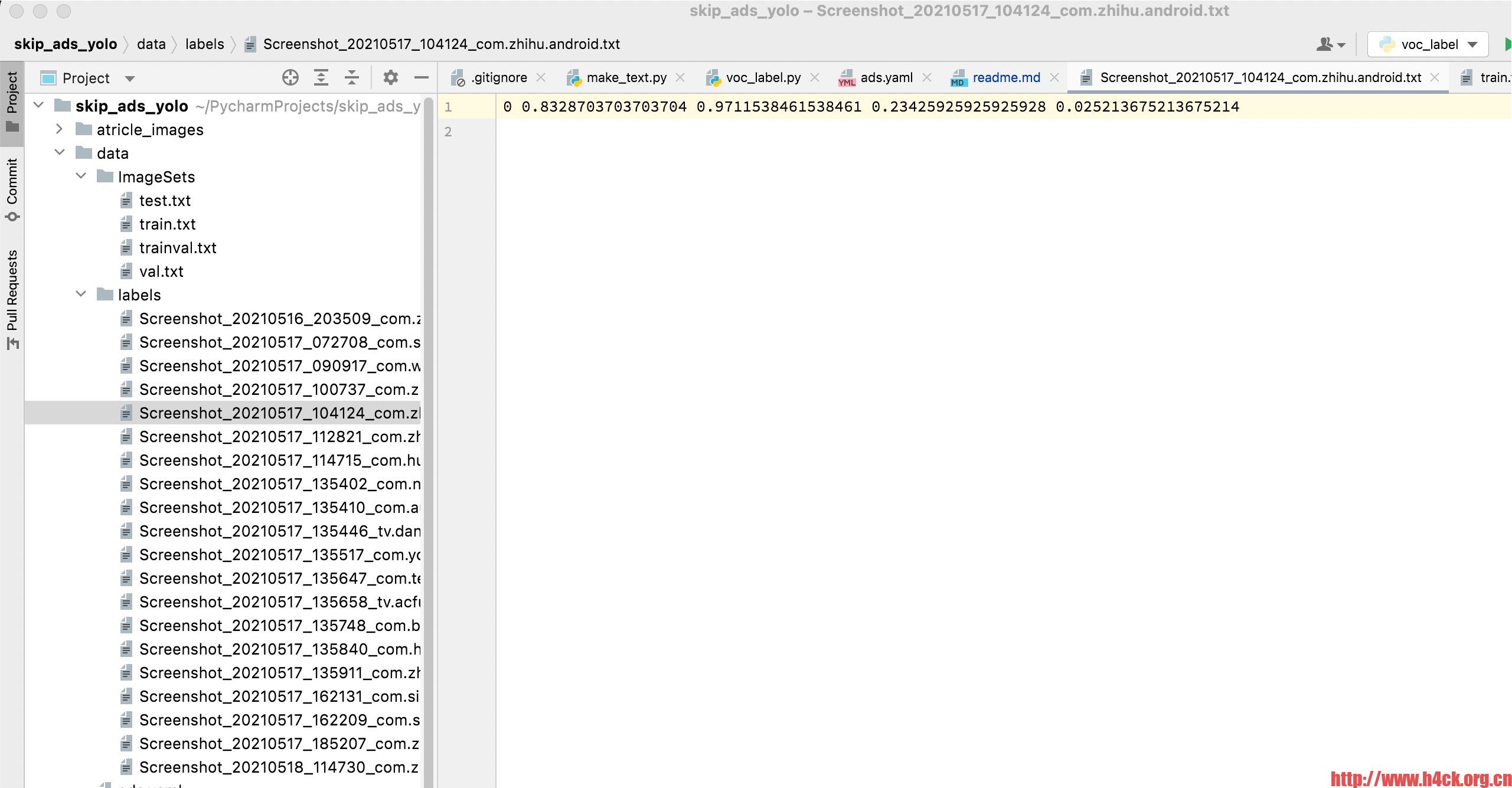
voc_label.py主要是将图片数据集标注后的xml文件中的标注信息读取出来并写入txt文件,运行后在labels文件夹中出现所有图片数据集的标注信息,如下图:
到这里,数据资源准备就ok了。
4.修改配置文件
在data目录下创建ads.yml内容如下:
# COCO 2017 dataset http://cocodataset.org
# Download command: bash yolov5/data/get_coco2017.sh
# Train command: python train.py --data ./data/coco.yaml
# Dataset should be placed next to yolov5 folder:
# /parent_folder
# /coco
# /yolov5
# train and val datasets (image directory or *.txt file with image paths)
train: data/train.txt # 118k images
val: data/val.txt # 5k images
test: data/test.txt # 20k images for submission to https://competitions.codalab.org/competitions/20794
# number of classes
nc: 1
# class names
names: ['skip']
# Print classes
# with open('data/coco.yaml') as f:
# d = yaml.load(f, Loader=yaml.FullLoader) # dict
# for i, x in enumerate(d['names']):
# print(i, x)
修改网络参数models/yolov5s.yaml(这里取决于你使用了哪个模型就去修改对于的文件,该项目中使用的是yolov5s模型),主要修改nc参数:
# YOLOv5 🚀 by Ultralytics, GPL-3.0 license # Parameters nc: 1 # number of classes depth_multiple: 0.33 # model depth multiple width_multiple: 0.50 # layer channel multiple anchors: - [10,13, 16,30, 33,23] # P3/8 - [30,61, 62,45, 59,119] # P4/16 - [116,90, 156,198, 373,326] # P5/32 # YOLOv5 backbone backbone: # [from, number, module, args] [[-1, 1, Focus, [64, 3]], # 0-P1/2 [-1, 1, Conv, [128, 3, 2]], # 1-P2/4 [-1, 3, C3, [128]], [-1, 1, Conv, [256, 3, 2]], # 3-P3/8 [-1, 9, C3, [256]], [-1, 1, Conv, [512, 3, 2]], # 5-P4/16 [-1, 9, C3, [512]], [-1, 1, Conv, [1024, 3, 2]], # 7-P5/32 [-1, 1, SPP, [1024, [5, 9, 13]]], [-1, 3, C3, [1024, False]], # 9 ] # YOLOv5 head head: [[-1, 1, Conv, [512, 1, 1]], [-1, 1, nn.Upsample, [None, 2, 'nearest']], [[-1, 6], 1, Concat, [1]], # cat backbone P4 [-1, 3, C3, [512, False]], # 13 [-1, 1, Conv, [256, 1, 1]], [-1, 1, nn.Upsample, [None, 2, 'nearest']], [[-1, 4], 1, Concat, [1]], # cat backbone P3 [-1, 3, C3, [256, False]], # 17 (P3/8-small) [-1, 1, Conv, [256, 3, 2]], [[-1, 14], 1, Concat, [1]], # cat head P4 [-1, 3, C3, [512, False]], # 20 (P4/16-medium) [-1, 1, Conv, [512, 3, 2]], [[-1, 10], 1, Concat, [1]], # cat head P5 [-1, 3, C3, [1024, False]], # 23 (P5/32-large) [[17, 20, 23], 1, Detect, [nc, anchors]], # Detect(P3, P4, P5) ]
train_ads.py 参数修改,主要参数解释如下。我们平时训练的话,主要用到的只有这几个参数而已:–weights,–cfg,–data,–epochs,–batch-size,–img-size,–project:
def parse_opt(known=False):
parser = argparse.ArgumentParser()
parser.add_argument('--weights', type=str, default='yolov5s.pt', help='initial weights path')
parser.add_argument('--cfg', type=str, default='', help='model.yaml path')
parser.add_argument('--data', type=str, default='data/ads.yaml', help='dataset.yaml path')
parser.add_argument('--hyp', type=str, default='data/hyps/hyp.scratch.yaml', help='hyperparameters path')
parser.add_argument('--epochs', type=int, default=300)
parser.add_argument('--batch-size', type=int, default=16, help='total batch size for all GPUs')
parser.add_argument('--imgsz', '--img', '--img-size', type=int, default=640, help='train, val image size (pixels)')
parser.add_argument('--rect', action='store_true', help='rectangular training')
parser.add_argument('--resume', nargs='?', const=True, default=False, help='resume most recent training')
parser.add_argument('--nosave', action='store_true', help='only save final checkpoint')
parser.add_argument('--noval', action='store_true', help='only validate final epoch')
parser.add_argument('--noautoanchor', action='store_true', help='disable autoanchor check')
parser.add_argument('--evolve', type=int, nargs='?', const=300, help='evolve hyperparameters for x generations')
parser.add_argument('--bucket', type=str, default='', help='gsutil bucket')
parser.add_argument('--cache', type=str, nargs='?', const='ram', help='--cache images in "ram" (default) or "disk"')
parser.add_argument('--image-weights', action='store_true', help='use weighted image selection for training')
parser.add_argument('--device', default='', help='cuda device, i.e. 0 or 0,1,2,3 or cpu')
parser.add_argument('--multi-scale', action='store_true', help='vary img-size +/- 50%%')
parser.add_argument('--single-cls', default=True,action='store_true', help='train multi-class data as single-class')
parser.add_argument('--adam', action='store_true', help='use torch.optim.Adam() optimizer')
parser.add_argument('--sync-bn', action='store_true', help='use SyncBatchNorm, only available in DDP mode')
parser.add_argument('--workers', type=int, default=8, help='maximum number of dataloader workers')
parser.add_argument('--project', default='runs/train', help='save to project/name')
parser.add_argument('--entity', default=None, help='W&B entity')
parser.add_argument('--name', default='exp', help='save to project/name')
parser.add_argument('--exist-ok', action='store_true', help='existing project/name ok, do not increment')
parser.add_argument('--quad', action='store_true', help='quad dataloader')
parser.add_argument('--linear-lr', action='store_true', help='linear LR')
parser.add_argument('--label-smoothing', type=float, default=0.0, help='Label smoothing epsilon')
parser.add_argument('--upload_dataset', action='store_true', help='Upload dataset as W&B artifact table')
parser.add_argument('--bbox_interval', type=int, default=-1, help='Set bounding-box image logging interval for W&B')
parser.add_argument('--save_period', type=int, default=-1, help='Log model after every "save_period" epoch')
parser.add_argument('--artifact_alias', type=str, default="latest", help='version of dataset artifact to be used')
parser.add_argument('--local_rank', type=int, default=-1, help='DDP parameter, do not modify')
parser.add_argument('--freeze', type=int, default=0, help='Number of layers to freeze. backbone=10, all=24')
parser.add_argument('--patience', type=int, default=30, help='EarlyStopping patience (epochs)')
opt = parser.parse_known_args()[0] if known else parser.parse_args()
return opt
5.训练模型
环境搭建好,数据准备完毕之后就可以开始进行魔性的训练了。直接执行train_ads.py进行模型训练:
(yolov5) zhongming@ZhongMingdeMacBook-Pro yolov5 % python train_ads.py
train: weights=yolov5s.pt, cfg=, data=data/ads.yaml, hyp=data/hyps/hyp.scratch.yaml, epochs=300, batch_size=16, imgsz=640, rect=False, resume=False, nosave=False, noval=False, noautoanchor=False, evolve=None, bucket=, cache=None, image_weights=False, device=, multi_scale=False, single_cls=True, adam=False, sync_bn=False, workers=8, project=runs/train, entity=None, name=exp, exist_ok=False, quad=False, linear_lr=False, label_smoothing=0.0, upload_dataset=False, bbox_interval=-1, save_period=-1, artifact_alias=latest, local_rank=-1, freeze=0, patience=30
github: ⚠️ YOLOv5 is out of date by 25 commits. Use `git pull` or `git clone https://github.com/ultralytics/yolov5` to update.
YOLOv5 🚀 v5.0-405-gfad57c2 torch 1.9.0 CPU
hyperparameters: lr0=0.01, lrf=0.2, momentum=0.937, weight_decay=0.0005, warmup_epochs=3.0, warmup_momentum=0.8, warmup_bias_lr=0.1, box=0.05, cls=0.5, cls_pw=1.0, obj=1.0, obj_pw=1.0, iou_t=0.2, anchor_t=4.0, fl_gamma=0.0, hsv_h=0.015, hsv_s=0.7, hsv_v=0.4, degrees=0.0, translate=0.1, scale=0.5, shear=0.0, perspective=0.0, flipud=0.0, fliplr=0.5, mosaic=1.0, mixup=0.0, copy_paste=0.0
TensorBoard: Start with 'tensorboard --logdir runs/train', view at http://localhost:6006/
wandb: (1) Create a W&B account
wandb: (2) Use an existing W&B account
wandb: (3) Don't visualize my results
wandb: Enter your choice: 3
wandb: You chose 'Don't visualize my results'
wandb: WARNING `resume` will be ignored since W&B syncing is set to `offline`. Starting a new run with run id 18h6dxo0.
wandb: W&B syncing is set to `offline` in this directory. Run `wandb online` or set WANDB_MODE=online to enable cloud syncing.
Overriding model.yaml nc=80 with nc=1
from n params module arguments
0 -1 1 3520 models.common.Focus [3, 32, 3]
1 -1 1 18560 models.common.Conv [32, 64, 3, 2]
2 -1 1 18816 models.common.C3 [64, 64, 1]
3 -1 1 73984 models.common.Conv [64, 128, 3, 2]
4 -1 3 156928 models.common.C3 [128, 128, 3]
5 -1 1 295424 models.common.Conv [128, 256, 3, 2]
6 -1 3 625152 models.common.C3 [256, 256, 3]
7 -1 1 1180672 models.common.Conv [256, 512, 3, 2]
8 -1 1 656896 models.common.SPP [512, 512, [5, 9, 13]]
9 -1 1 1182720 models.common.C3 [512, 512, 1, False]
10 -1 1 131584 models.common.Conv [512, 256, 1, 1]
11 -1 1 0 torch.nn.modules.upsampling.Upsample [None, 2, 'nearest']
12 [-1, 6] 1 0 models.common.Concat [1]
13 -1 1 361984 models.common.C3 [512, 256, 1, False]
14 -1 1 33024 models.common.Conv [256, 128, 1, 1]
15 -1 1 0 torch.nn.modules.upsampling.Upsample [None, 2, 'nearest']
16 [-1, 4] 1 0 models.common.Concat [1]
17 -1 1 90880 models.common.C3 [256, 128, 1, False]
18 -1 1 147712 models.common.Conv [128, 128, 3, 2]
19 [-1, 14] 1 0 models.common.Concat [1]
20 -1 1 296448 models.common.C3 [256, 256, 1, False]
21 -1 1 590336 models.common.Conv [256, 256, 3, 2]
22 [-1, 10] 1 0 models.common.Concat [1]
23 -1 1 1182720 models.common.C3 [512, 512, 1, False]
24 [17, 20, 23] 1 16182 models.yolo.Detect [1, [[10, 13, 16, 30, 33, 23], [30, 61, 62, 45, 59, 119], [116, 90, 156, 198, 373, 326]], [128, 256, 512]]
[W NNPACK.cpp:79] Could not initialize NNPACK! Reason: Unsupported hardware.
Model Summary: 283 layers, 7063542 parameters, 7063542 gradients, 16.4 GFLOPs
Transferred 356/362 items from yolov5s.pt
Scaled weight_decay = 0.0005
optimizer: SGD with parameter groups 59 weight, 62 weight (no decay), 62 bias
train: Scanning 'data/train' images and labels...16 found, 0 missing, 0 empty, 0 corrupted: 100%|██| 16/16 [00:02<00:00, 6.10it/s]
train: New cache created: data/train.cache
val: Scanning 'data/val' images and labels...2 found, 0 missing, 0 empty, 0 corrupted: 100%|█████████| 2/2 [00:04<00:00, 2.46s/it]
val: New cache created: data/val.cache
Plotting labels...
autoanchor: Analyzing anchors... anchors/target = 4.44, Best Possible Recall (BPR) = 1.0000
Image sizes 640 train, 640 val
Using 8 dataloader workers
Logging results to runs/train/exp3
Starting training for 300 epochs...
Epoch gpu_mem box obj cls labels img_size
0/299 0G 0.1386 0.01956 0 28 640: 100%|████████████████████████| 1/1 [00:33<00:00, 33.46s/it]
Class Images Labels P R mAP@.5 mAP@.5:.95: 100%|████████| 1/1 [00:00<00:00, 1.56it/s] all 2 0 0 0 0 0
Class Images Labels P R mAP@.5 mAP@.5:.95: 100%|████████| 1/1 [00:00<00:00, 1.56it/s]
Epoch gpu_mem box obj cls labels img_size
1/299 0G 0.1378 0.0202 0 31 640: 100%|████████████████████████| 1/1 [00:27<00:00, 27.41s/it]
Class Images Labels P R mAP@.5 mAP@.5:.95: 100%|████████| 1/1 [00:00<00:00, 1.66it/s]
all 2 0 0 0 0 0
Epoch gpu_mem box obj cls labels img_size
150/299 0G 0.05562 0.01635 0 27 640: 100%|████████████████████████| 1/1 [00:26<00:00, 26.94s/it]
Class Images Labels P R mAP@.5 mAP@.5:.95: 100%|████████| 1/1 [00:00<00:00, 1.85it/s]
all 2 2 0.99 0.5 0.535 0.252
Epoch gpu_mem box obj cls labels img_size
151/299 0G 0.05614 0.01598 0 23 640: 100%|████████████████████████| 1/1 [00:26<00:00, 26.93s/it]
Class Images Labels P R mAP@.5 mAP@.5:.95: 100%|████████| 1/1 [00:00<00:00, 1.86it/s]
all 2 2 0.997 0.5 0.538 0.207
EarlyStopping patience 30 exceeded, stopping training.
152 epochs completed in 8.084 hours.
Optimizer stripped from runs/train/exp3/weights/last.pt, 14.4MB
Optimizer stripped from runs/train/exp3/weights/best.pt, 14.4MB
wandb: Waiting for W&B process to finish, PID 63332
wandb: Program ended successfully.
wandb: Find user logs for this run at: /Users/zhongming/PycharmProjects/yolov5/wandb/offline-run-20210913_191626-18h6dxo0/logs/debug.log
wandb: Find internal logs for this run at: /Users/zhongming/PycharmProjects/yolov5/wandb/offline-run-20210913_191626-18h6dxo0/logs/debug-internal.log
wandb: Run summary:
wandb: train/box_loss 0.05614
wandb: train/obj_loss 0.01598
wandb: train/cls_loss 0.0
wandb: metrics/precision 0.99749
wandb: metrics/recall 0.5
wandb: metrics/mAP_0.5 0.53848
wandb: metrics/mAP_0.5:0.95 0.20678
wandb: val/box_loss 0.06087
wandb: val/obj_loss 0.02391
wandb: val/cls_loss 0.0
wandb: x/lr0 0.0009
wandb: x/lr1 0.0009
wandb: x/lr2 0.0858
wandb: _runtime 29117
wandb: _timestamp 1631560903
wandb: _step 152
wandb: Run history:
wandb: train/box_loss ███▇▇▇▇▆▆▆▅▅▅▄▄▅▄▄▃▃▅▄▄▃▂▃▂▂▃▂▂▂▂▂▂▂▂▁▂▂
wandb: train/obj_loss ▅▅▅▄▃▃▃▂▄▄▅▄▃▆▄▄▅▁▅▅▃▅▆█▇██▃▁▃▃▃▆▄▅▂▆▅▄▂
wandb: train/cls_loss ▁▁▁▁▁▁▁▁▁▁▁▁▁▁▁▁▁▁▁▁▁▁▁▁▁▁▁▁▁▁▁▁▁▁▁▁▁▁▁▁
wandb: metrics/precision ▁▁▁▁▁▁▁▁▁▁▁▁▁▂▁▁▁▁▂▁▁▁▁▁▁▁▁▂▃▃▄█████████
wandb: metrics/recall ▁▁▁▁▁▁▁▁▁▁▁▅▅▅▁▅▅█▅▁▅▅█▅▅▅▅▅▅▅▅▅▅▅▅▅▅▅▅▅
wandb: metrics/mAP_0.5 ▁▁▁▁▁▁▁▁▁▁▁▁▁▂▁▁▁▁▂▁▁▁▁▁▁▂▂▂▃▃▄█████████
wandb: metrics/mAP_0.5:0.95 ▁▁▁▁▁▁▁▁▁▁▁▁▁▁▁▁▁▁▁▁▁▁▁▁▁▁▂▂▃▃▅█▅▆▆▅▅▆▅▅
wandb: val/box_loss █████▇▇▇▇▆▆▅▅▅▅▅▅▄▄▅▅▄▄▃▂▃▂▂▃▂▂▂▁▁▁▂▂▂▂▁
wandb: val/obj_loss ▄▄▄▃▃▂▂▁▁▁▂▂▂▂▂▂▂▃▃▃▂▃▄▅▇▆▇▇▇▆▇▆█▇▇▆▆▆▄▆
wandb: val/cls_loss ▁▁▁▁▁▁▁▁▁▁▁▁▁▁▁▁▁▁▁▁▁▁▁▁▁▁▁▁▁▁▁▁▁▁▁▁▁▁▁▁
wandb: x/lr0 ▁▁▁▂▂▂▃▃▃▄▄▄▄▅▅▅▅▆▆▆▆▆▇▇▇▇▇▇▇███████████
wandb: x/lr1 ▁▁▁▂▂▂▃▃▃▄▄▄▄▅▅▅▅▆▆▆▆▆▇▇▇▇▇▇▇███████████
wandb: x/lr2 ████▇▇▇▇▇▆▆▆▆▆▆▅▅▅▅▅▅▄▄▄▄▄▃▃▃▃▃▃▂▂▂▂▂▁▁▁
wandb: _runtime ▁▁▁▁▁▁▁▁▁▂▂▂▂▃▃▃▃▃▃▃▃▄▅▅▆▆▇▇▇▇▇▇▇▇▇█████
wandb: _timestamp ▁▁▁▁▁▁▁▁▁▂▂▂▂▃▃▃▃▃▃▃▃▄▅▅▆▆▇▇▇▇▇▇▇▇▇█████
wandb: _step ▁▁▁▁▂▂▂▂▂▃▃▃▃▃▃▄▄▄▄▄▅▅▅▅▅▅▆▆▆▆▆▇▇▇▇▇▇███
wandb:
wandb: You can sync this run to the cloud by running:
wandb: wandb sync /Users/zhongming/PycharmProjects/yolov5/wandb/offline-run-20210913_191626-18h6dxo0
训练结束之后的文件保存在Optimizer stripped from runs/train/exp3/weights/last.pt, 14.4MB Optimizer stripped from runs/train/exp3/weights/best.pt, 14.4MB两个文件中。到这里模型训练就结束了。
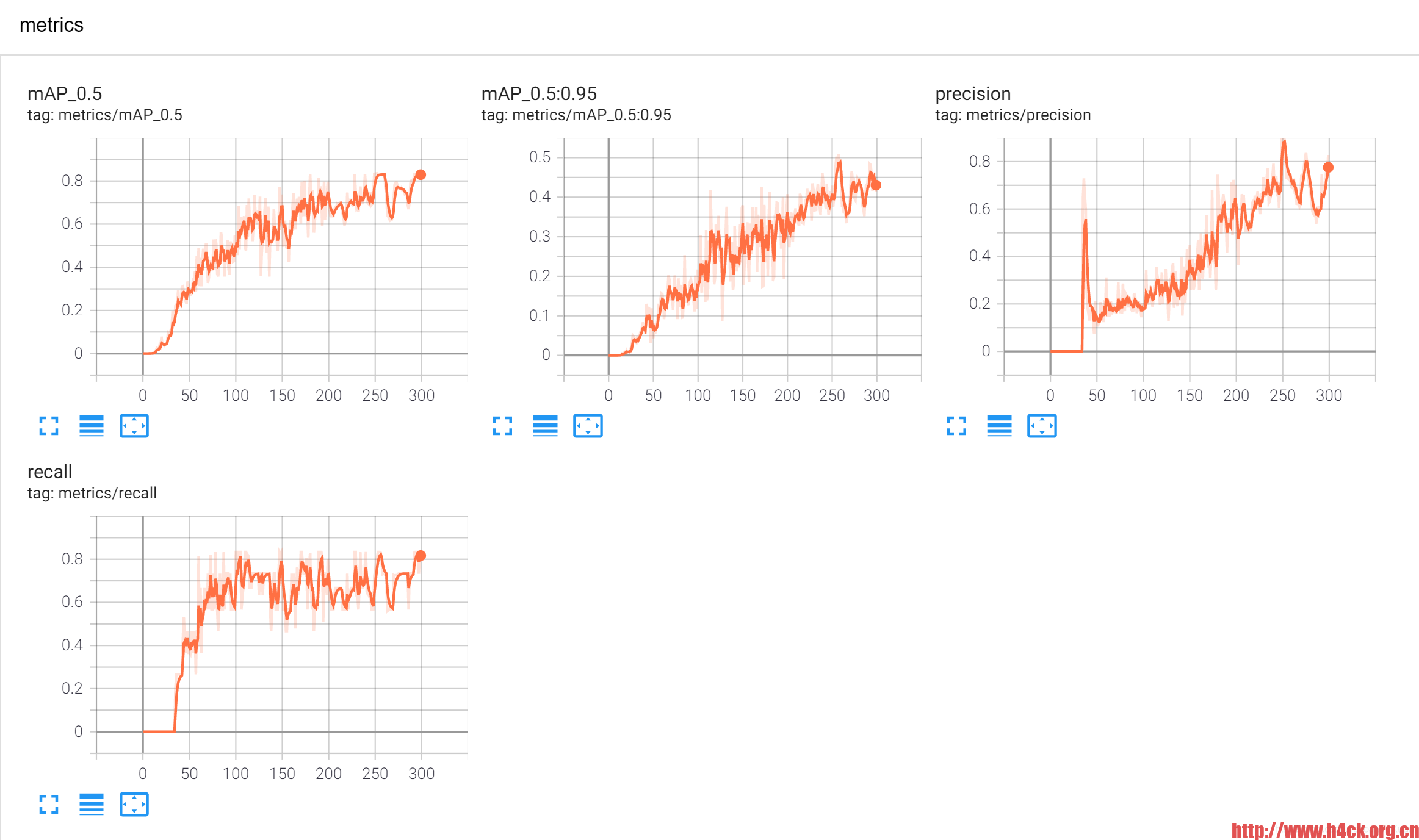
在训练中,也可以随时查看每一轮次训练的结果,可利用tensorboard可视化训练过程,训练开始时会在runs/train/exp文件夹中产生一个“events.out.tfevents.1608924773.JWX.5276.0”文件,利用tensorboard打开即可查看训练日志。首先我们通过cmd进去该YOLOv5所在的项目文件夹,然后激活所用的虚拟环境,输入如下命令行:
tensorboard --logdir runs/train/exp
命令行输入信息的整体显示如下所示:
activate yolov5 ensorboard --logdir runs/train/exp TensorFlow installation not found - running with reduced feature set. Serving TensorBoard on localhost; to expose to the network, use a proxy or pass --bind_all TensorBoard 2.4.0 at http://localhost:6006/ (Press CTRL+C to quit)
到这一步后,我们就可打开 http://localhost:6006/ 网页查看每一轮次训练的结果,如图所示。
6.实现检查
修改detect_ads.py中的参数主要用到的只有这几个参数:–weights,–source,–conf-thres,–project:
def parse_opt():
parser = argparse.ArgumentParser()
parser.add_argument('--weights', nargs='+', type=str, default='runs/train/exp3/weights/last.pt', help='model.pt path(s)')
parser.add_argument('--source', type=str, default='data/images', help='file/dir/URL/glob, 0 for webcam')
parser.add_argument('--imgsz', '--img', '--img-size', nargs='+', type=int, default=[640], help='inference size h,w')
parser.add_argument('--conf-thres', type=float, default=0.1, help='confidence threshold')
parser.add_argument('--iou-thres', type=float, default=0.45, help='NMS IoU threshold')
parser.add_argument('--max-det', type=int, default=1000, help='maximum detections per image')
parser.add_argument('--device', default='', help='cuda device, i.e. 0 or 0,1,2,3 or cpu')
parser.add_argument('--view-img', action='store_true', help='show results')
parser.add_argument('--save-txt', action='store_true', help='save results to *.txt')
parser.add_argument('--save-conf', action='store_true', help='save confidences in --save-txt labels')
parser.add_argument('--save-crop', action='store_true', help='save cropped prediction boxes')
parser.add_argument('--nosave', action='store_true', help='do not save images/videos')
parser.add_argument('--classes', nargs='+', type=int, help='filter by class: --class 0, or --class 0 2 3')
parser.add_argument('--agnostic-nms', action='store_true', help='class-agnostic NMS')
parser.add_argument('--augment', action='store_true', help='augmented inference')
parser.add_argument('--visualize', action='store_true', help='visualize features')
parser.add_argument('--update', action='store_true', help='update all models')
parser.add_argument('--project', default='runs/detect', help='save results to project/name')
parser.add_argument('--name', default='exp', help='save results to project/name')
parser.add_argument('--exist-ok', action='store_true', help='existing project/name ok, do not increment')
parser.add_argument('--line-thickness', default=3, type=int, help='bounding box thickness (pixels)')
parser.add_argument('--hide-labels', default=False, action='store_true', help='hide labels')
parser.add_argument('--hide-conf', default=False, action='store_true', help='hide confidences')
parser.add_argument('--half', action='store_true', help='use FP16 half-precision inference')
opt = parser.parse_args()
opt.imgsz *= 2 if len(opt.imgsz) == 1 else 1 # expand
return opt
通过下面的命令进行检测:
python detect_ads.py --source /Users/zhongming/PycharmProjects/skip_ads_yolo/Screenshots/Screenshot_20210517_135446_tv.danmaku.bili.jpg
检测回显:
python detect_ads.py --source /Users/zhongming/PycharmProjects/skip_ads_yolo/Screenshots/Screenshot_20210517_135446_tv.danmaku.bili.jpg detect: weights=runs/train/exp3/weights/best.pt, source=/Users/zhongming/PycharmProjects/skip_ads_yolo/Screenshots/Screenshot_20210517_135446_tv.danmaku.bili.jpg, imgsz=[640, 640], conf_thres=0.01, iou_thres=0.45, max_det=1000, device=, view_img=False, save_txt=False, save_conf=False, save_crop=False, nosave=False, classes=None, agnostic_nms=False, augment=False, visualize=False, update=False, project=runs/detect, name=exp, exist_ok=False, line_thickness=3, hide_labels=False, hide_conf=False, half=False YOLOv5 🚀 v5.0-405-gfad57c2 torch 1.9.0 CPU Fusing layers... [W NNPACK.cpp:79] Could not initialize NNPACK! Reason: Unsupported hardware. Model Summary: 224 layers, 7053910 parameters, 0 gradients, 16.3 GFLOPs image 1/1 /Users/zhongming/PycharmProjects/skip_ads_yolo/Screenshots/Screenshot_20210517_135446_tv.danmaku.bili.jpg: 640x320 31 skips, Done. (0.297s) Results saved to runs/detect/exp22 Done. (0.388s)
如果不修改detect.py文件这可以通过下面的命令进行检测:
yolov5 % python detect_ads.py --source /Users/zhongming/PycharmProjects/skip_ads_yolo/Screenshots/Screenshot_20210517_135446_tv.danmaku.bili.jpg --weights ads_best.pt
检测效果,由于样本太少,导致检测到的概率太低,为了显示出来这里把parser.add_argument(‘–conf-thres’, type=float, default=0.1,)–conf-thres调成了0.1否则直接检测不到跳过按钮,调低之后检测到的跳过按钮有的并不是跳过按钮(后一张图)。

下图检测到的按钮是有问题的:

为了提高检测准确度,下一步会加大样本量再次训练,等待看效果吧 ~~
安卓apk开屏广告跳过按钮识别项目,项目地址:https://github.com/obaby/skip_ads_yolov5
obaby@mars
http://www.h4ck.org.cn
http://www.obaby.org.cn
参考链接:
https://github.com/EvgenMeshkin/ScreenShot/blob/master/app/src/main/java/by/android/evgen/screenshot/ScreenActivity.java
https://blog.csdn.net/qq_38499859/article/details/90523283
https://juejin.cn/post/6844903589127651335
https://stackoverflow.com/questions/2661536/how-to-programmatically-take-a-screenshot-on-android

2 comments
这个机器学习是看懂了,app广告跳过的原理没看懂,是自动点击跳过按钮吗
是的